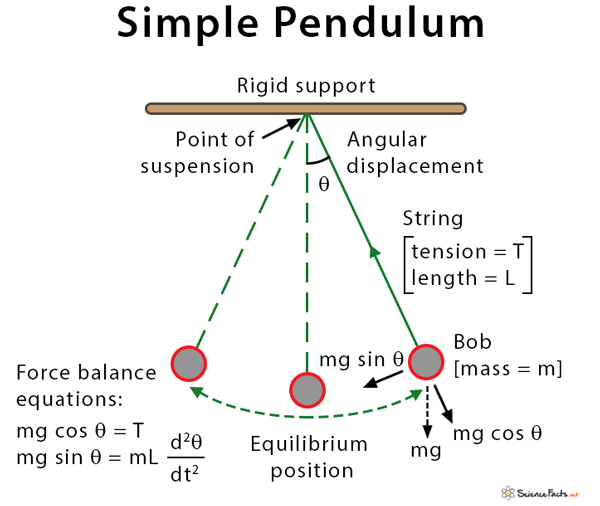
Although the pendulum has a long history, Italian scientist Galileo Galilei was the first to study the properties of pendulums, beginning around 1602. Time Period (T): Time taken by the pendulum to finish one full oscillation Linear Displacement (x): Distance traveled by the pendulum bob from the equilibrium position to one side. Angular Displacement (θ): The angle described by the pendulum with an imaginary axis at the equilibrium position is called the angular displacement. Amplitude (xmax): Maximum distance traveled by the pendulum from the equilibrium position to one side before changing its direction. For angle, it is denoted by θmax. F = ma The equation can be written in differential form as If the amplitude of displacement is small, then the small-angle approximation holds, i.e., sin θ ~ θ. This equation represents a simple harmonic motion. Thus, the motion of a simple pendulum is a simple harmonic motion with an angular frequency, ( \omega = \sqrt{\frac{g}{L}} ), and linear frequency, ( f = \frac{1}{2\pi}\sqrt{\frac{g}{L}} ). The time period is given by, Performing dimension analysis on the right side of the above equation gives the unit of time. [L/LT-2]1/2 = [T] The principle of a simple pendulum can be understood as follows. The restoring force of the pendulum from the above is, F = -mgL θ. This force is responsible for restoring the pendulum to its equilibrium position. However, due to the inertia of motion, the pendulum passes the equilibrium position and swings to the other side. This motion is periodic and can be solved using differential equation analysis. After solving the differential equation, the angular displacement is given by θ = θmax sin (ωt) Sometimes, a phase φ is added to the above equation depending upon the initial conditions of the pendulum. Then, the equation can be written as θ = θmax sin (ωt + φ) A simple pendulum is a typical laboratory experiment in many academic curricula. Students are often asked to evaluate the value of the acceleration due to gravity, g, using the equation for the time period of a pendulum. Rearranging the time period equation, Note that the component mg cos θ is balanced by the tension T of the string, i.e., T = mg cos θ.